OMNET BASED SIMULATION FOR UNDERWATER ENVIRONMENT Communication between also a set of underwater systems such as remote sensors, autonomous underwater vehicles and also control vessels would enhance the effective use of such systems tremendously.Wireless information transmission through the ocean is also one of the enabling technologies for the development of future ocean-observation systems and also sensor networks.
Reasons for introducing underwater environment simulation using Omnet++:
- Distributed tactical surveillance.
- Environmental monitoring.
- Mine reconnaissance.
- Ocean sampling network.
- Assisted navigation.
- Undersea exploration.
- Disaster prevention.
Challenges on underwater environment:
- Multipath and fading.
- Speed and bandwidth of the system.
- Extremely variable High propagation delay.
- Limited battery power.
- Discussion also on fouling and corrosion.
- High bit error rates.
- Temporary losses of connectivity.
Networking topology of underwater environment:
- Capacity.
- Energy consumption.
- Reliability.
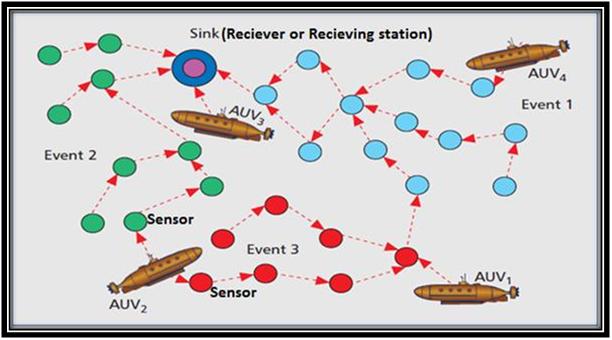
Architecture of underwater environment:
Signal& Signal::operator=(const Signal& o) {
sendingStart = o.sendingStart;
duration = o.duration;
propagationDelay = o.propagationDelay;
senderModuleID = o.senderModuleID;
senderFromGateID = o.senderFromGateID;
receiverModuleID = o.receiverModuleID;
receiverToGateID = o.receiverToGateID;
markRcvPowerOutdated();
if(power){
delete power;
power = NULL;
} if(bitrate){
delete bitrate;
bitrate = NULL;
} if(txBitrate){
delete txBitrate;txBitrate = NULL;
} for(ConstMappingList::const_iterator it = o.attenuations.begin();
it != o.attenuations.end(); ++it){
attenuations.push_back((*it)->constClone());
}
return *this;
}